Quadrature Encoder
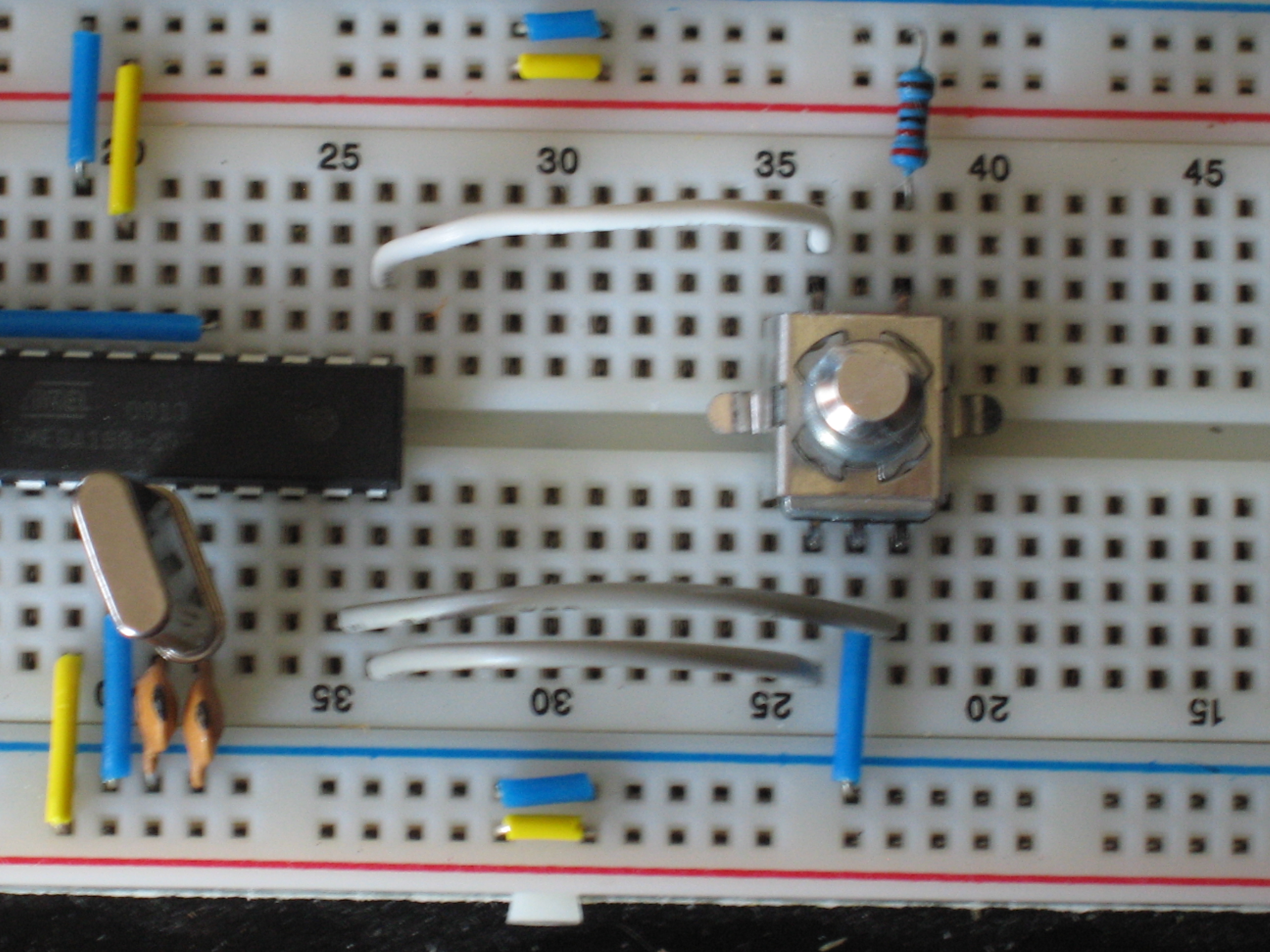
This installment of Scott's bread boarding adventures, involves a quadrature encoder. I'm not sure where I got this one, and there are no part numbers, so no datasheet. My version is a 20 steps per revolution, no detent, and a momentary push button on top. I bent the two structural legs out to the side to make affixing easier.
The easy part of the project is the code. There are a lot of ways to get this running, but the easiest and most reliable is to grab a copy of Keith Neufeld's excellent library.
I found that my encoder uses a maximum of 0.3mA.
Use a current limiting resistor on the momentary switch side to reduce power. I used a 20k resistor. On some designs you might need to include a pull-up resistor, but I used the internal resistors of the ATMEGA168 processor.
extern \"C\" {
#include \"WConstants.h\"
}
#include \"Quadrature.h\"
unsigned int encoder1_pos;
unsigned int encoder1_pos_old;
Quadrature encoder1(7, 8); // Connected to pins 7 and 8
const int pin_reset = 9; // Button on encoder sunk on pin 9 with current limiting resistor (22k)
void setup() {
encoder1.minimum(0);
encoder1.maximum(100);
encoder1.position(50);
pinMode(pin_reset, INPUT);
digitalWrite(pin_reset, HIGH); // Turn on internal pull up resistors
Serial.begin (115200);
}
void loop() {
char buf[127] = \"\";
if (digitalRead(pin_reset) == LOW) {
encoder1.position(50);
}
//Check for change in position
encoder1_pos = encoder1.position();
if (encoder1_pos != encoder1_pos_old) {
encoder1_pos_old = encoder1_pos;
for (int j=0; j<=encoder1_pos; j++) {
buf[j] = \'=\';
}
Serial.println(buf);
}
}
created: Dec. 1, 2013, 1:01 a.m.
modified: April 14, 2019, 12:50 a.m.